时域模型
例子
弹簧-质量-阻尼器机械位移系统
RLC串联系统
...
标准形式
- 系数转化为时间常数
- 与输出有关的放在左边, 与输入有关的放在右边
- 按照求导阶数降序排列
这里的量纲为时间.
例如对于RLC串联系统, 可以为.
标准形式的微分方程
满足如下约束
- 系数都为实数
- 一般有, 因为实际物理系统都具有惯性
- 左右两边的量纲是一致的
这描述了一个线性系统, 具有如下性质
- 叠加性: 可以相加
- 齐次性: 可以做缩放
非线性模型
线性化方法
- 忽略弱线性的环节
- Taylor系数展开
- 平均斜率法
域模型
- Final Value Theorem 求留数的方法:
- 一次分母
- 高次分母(把第次留数项直接减掉, 或者求导)
传递函数:单输入单输出线性定常动态对象的传递函数是零初值条件下该对象的输出量的Laplace变换和输入量的Laplace变换之比
给定传递函数, 无论输入如何, 系统都以相同的传递作用输出信息或能量
传递函数的性质
- 传递函数和微分方程等价
- 和输入量无关
- 只适用于线形定常(Linear Time-Invariant Systems (LTI))系统
- 不反映中间变量具体的传递关系, 只描述输入和输出之间的关系
- 一般为复变量的有理实分式, 期中分母多项式是系统的特征多项式, 决定系统的动态性能 (极点决定了系统固有的运动属性)
- 在零初始条件下定义, 因此只能反应零状态响应
- 传递函数是系统单位冲激响应的Laplace变换
零-极点图
运动模态
对应的时间域函数为
自由运动的三种模态, 取决于对应的三个特征根
运动模态:一般来说, 如果微分方程的特征根是 ……, (无重复), 则函数被定义为方程的运动模态.
如果特征根中有共轭复根, 则共轭复模态可以写成和.
如果特征根中有重根, 则模态将具有、、的形式
极点位置决定模态的收敛性/稳定性: 当极点具有负实部或为负实数时, 对应运动模态是收敛的 (在时衰减到). 稳定性问题完全取决于极点的位置, 在零极点分布图上, 全部极点在左半平面, 系统即稳定. 极点距离虚轴越远, 相应模态收敛越快
零点决定运动模态的比重: 若零点靠近某极点, 则该极点的对应模态比重会减小;当零极点对消时, 相应模态消失
两种形式的传递系数
传递系数决定了系统稳态的传递性能:稳态输出与输入成比例关系 设
其中
- 根轨迹增益
- 静态放大倍数(静态增益) 设系统输入为, 则由终值定理得稳态输出为
结构图和信号流图
结构图
由具有一定函数关系的环节组成的,并标明信号流向的系统的方框图,称为系统的结构图
开环和闭环系统的结构图
闭环系统的传递函数
正向传递, 反馈传递
结构图的等效变换
复杂结构图的化简
信号流图
信号流图是表示一组联立线性代数方程的图,由节点表示变量、 由支路表示传输(增益),可表达变量之间的信号传递关系、函数运算关系和变量因果关系
- 源点: 只有输出支路的节点称为源点或称为输入节点
- 汇点: 只有输入支路的节点称为汇点或称为输出节点
- 混合节点: 既有输入支路又有输出支路的节点称混合节点
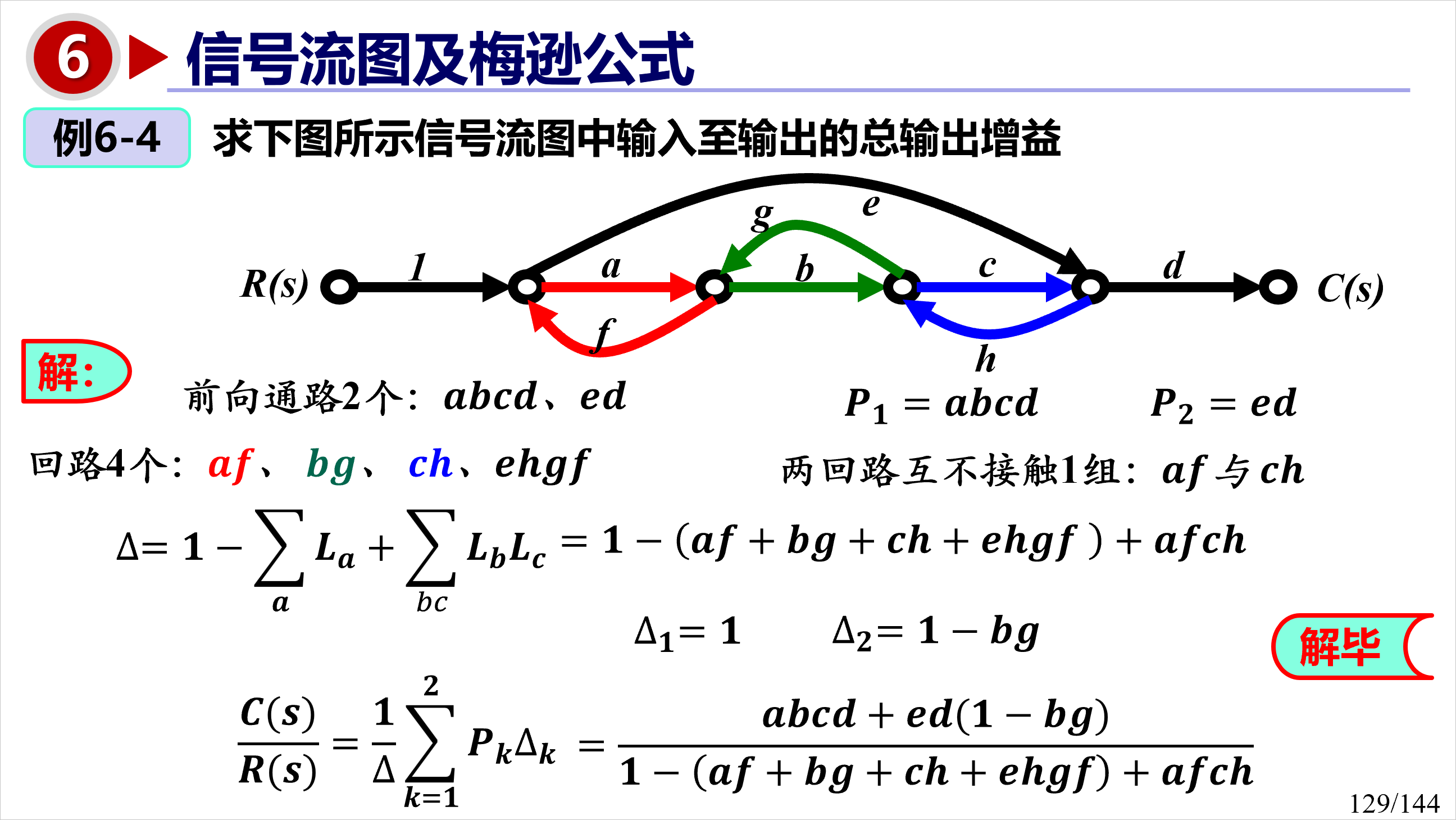
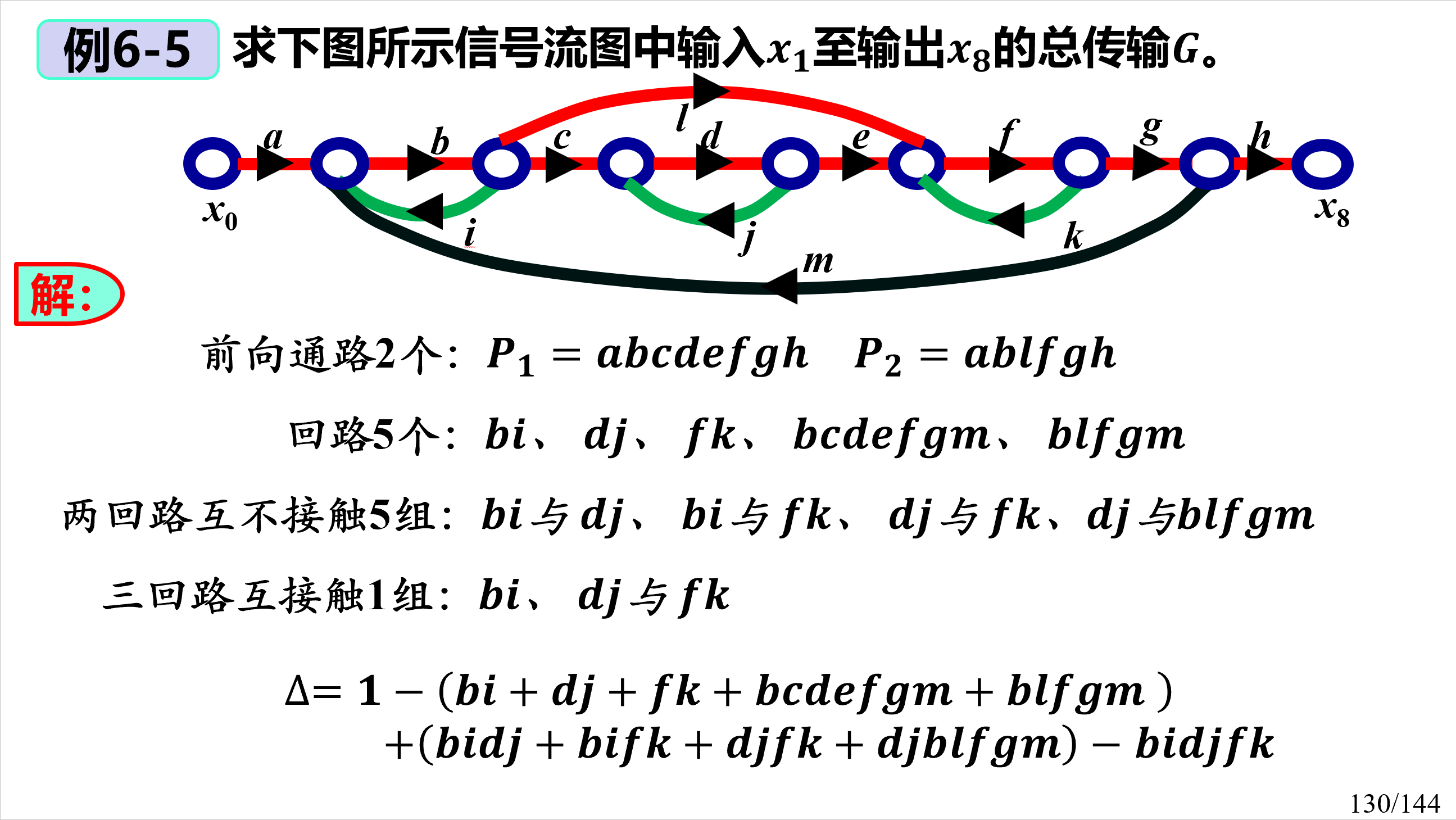
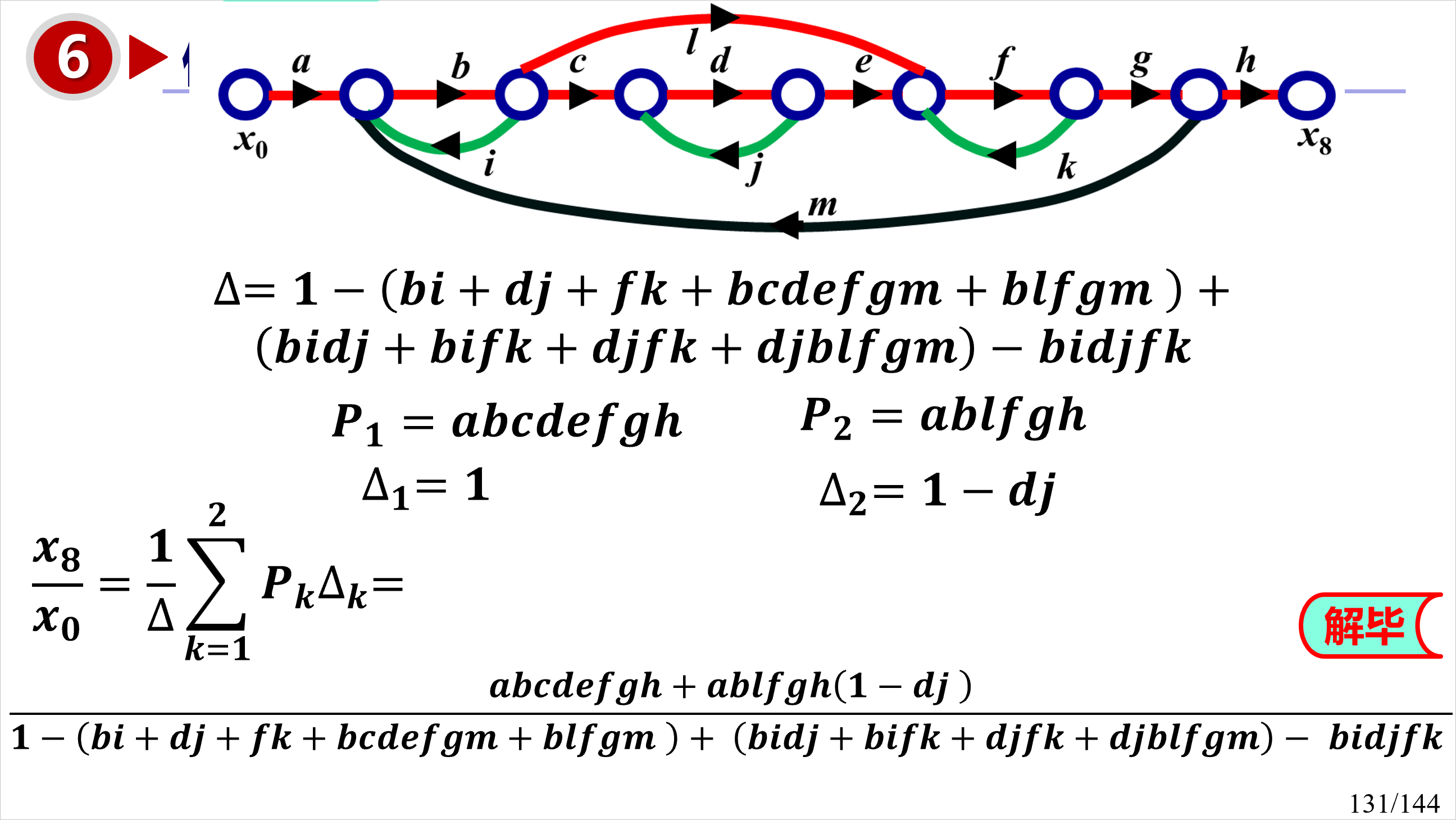
梅逊增益公式
对于一个信号流图,系统的传递函数 可以表示为:
其中:
- 是第 条前向路径的增益。
- 是系统的行列式(determinant),计算公式为:
- 是单个环路的增益之和(这里的环路不能再被拆分成更小的环路, 也就是说这个环路的任意真子图都不能构成一个环路)
- 是不接触环路的增益乘积之和(不能有公共的节点)
- 是三个不接触环路的增益乘积之和
- 是与第 条前向路径不接触的子图的行列式
Note
可以使用DFS的方式来找到所有回路