First Order
Time Domain
then
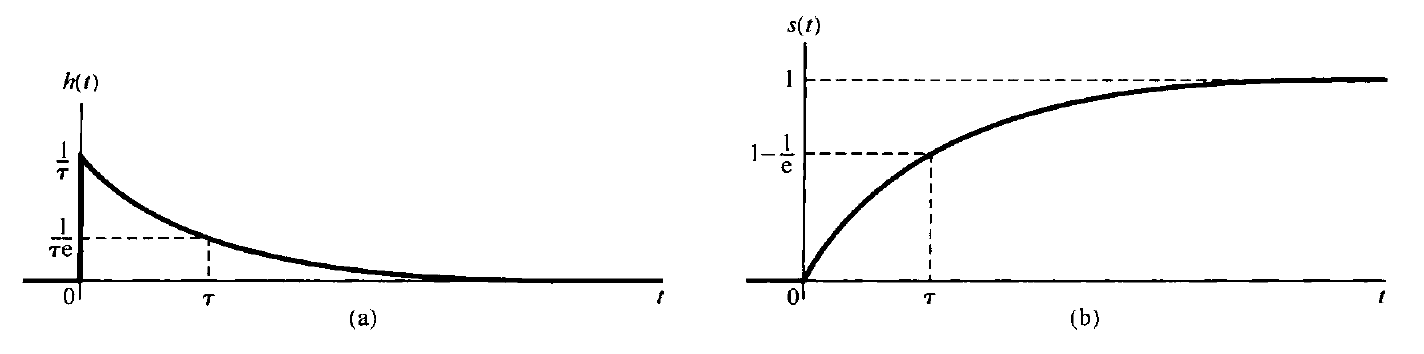
⇒ impulse response
⇒ step response
where is the time constant of the system. (see the figure below)
Frequency Domain
Draw the Bode Plot of the system
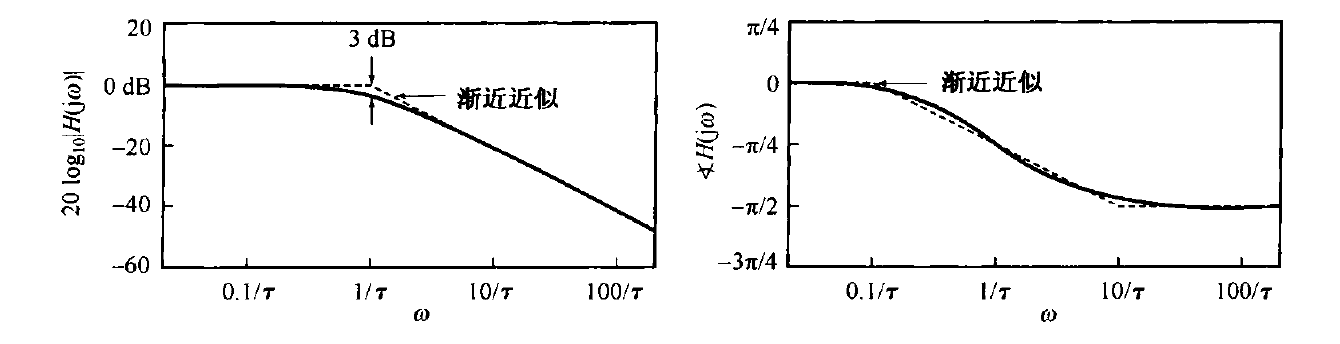 The logarithmic modulus characteristic of a first-order system is an asymptotic straight line in both the low-frequency and high-frequency domains. And in low-frequency , we have near zero magnitude response from the system.
The logarithmic modulus characteristic of a first-order system is an asymptotic straight line in both the low-frequency and high-frequency domains. And in low-frequency , we have near zero magnitude response from the system.
We call the break frequency, where we have
So we can also call it the 3dB point.
Second Order
Time Domain
⇒
where
⇒
We call
- : damping ratio
- : undamped natural frequency
Note: the oscillating frequency is always less than unless there is no damp (i.e. ). That's why is called the undamped natural frequency.
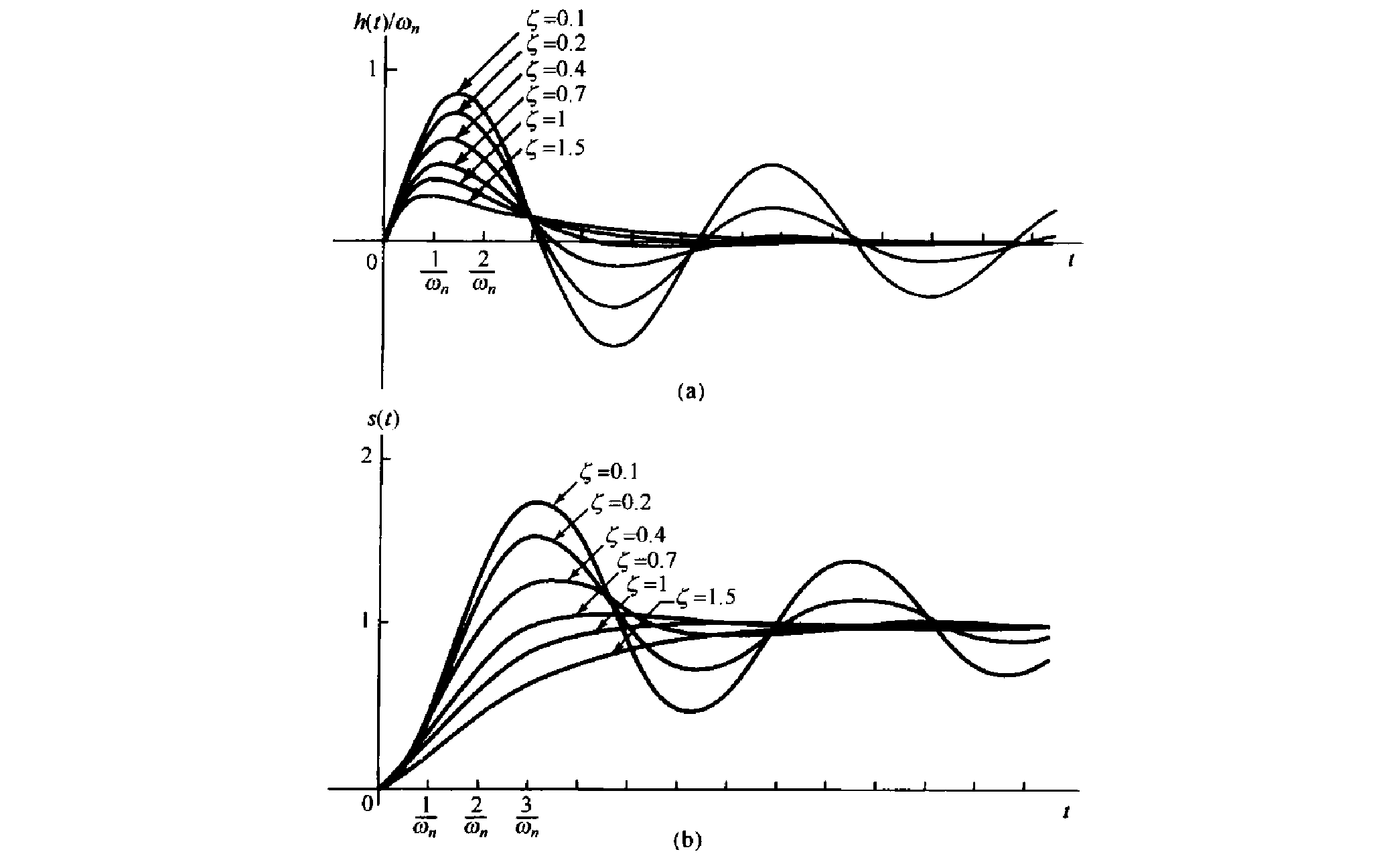 Cases
Cases
- : Underdamped. Having overshoot and oscillation
- : Critically Damped. Fast and no overshoot
- : Overdamped. No overshoot but more slow to converge
Frequency Domain
Bode Plot:
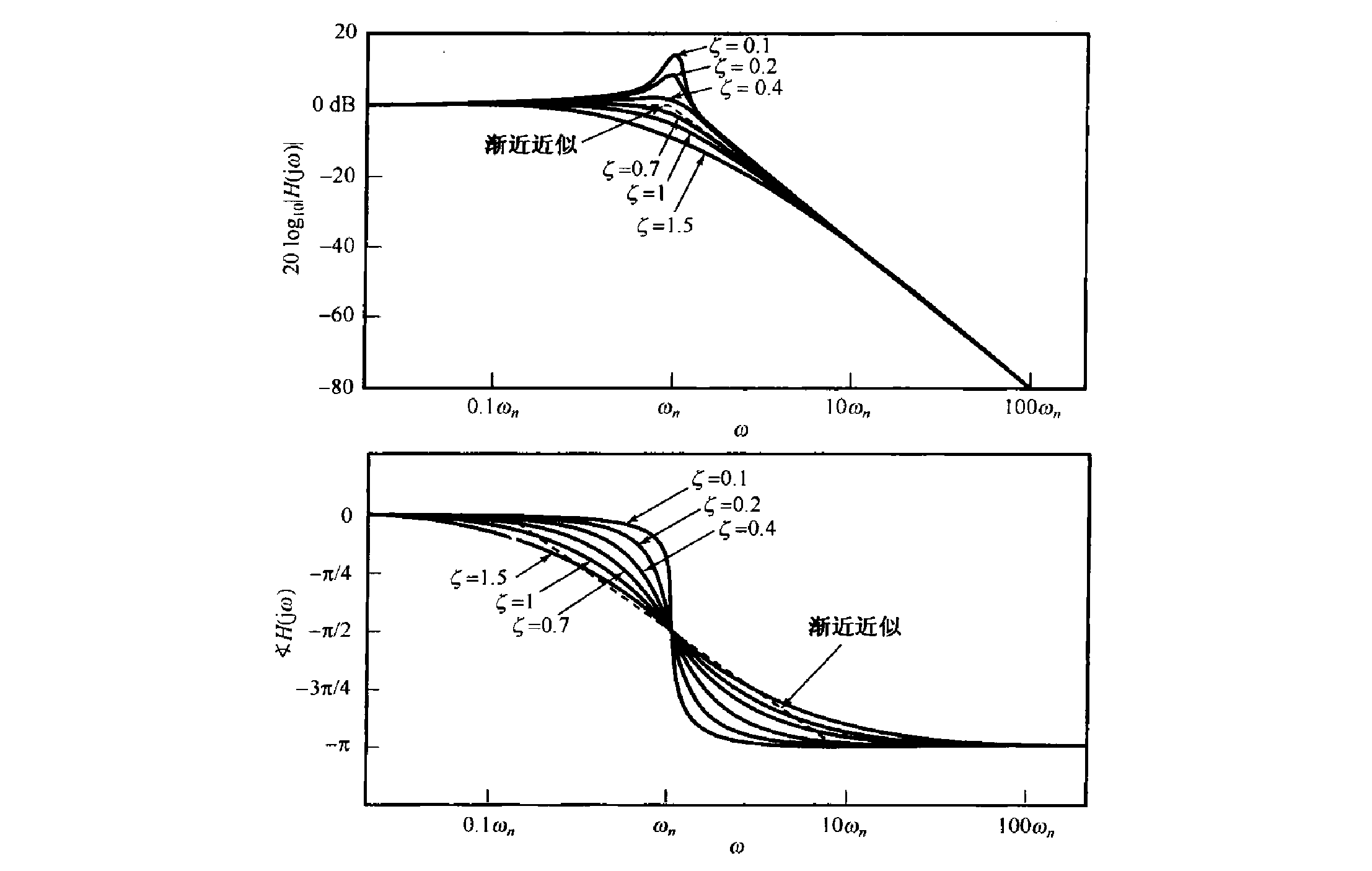 We can still detect a breaking point at . At both sides of the breaking point we can have a asymptotic straight line.
We can still detect a breaking point at . At both sides of the breaking point we can have a asymptotic straight line.
reaches it highest point at
when .
The fact that may have a peak value is very important in designing frequency-selective filters and selective amplifiers. In some applications, it may be desirable to design such circuits so that their magnitude response has a sharp peak at a given frequency, thereby providing selectivity within a relatively narrow range of frequencies.
This type of circuit uses the quality factor () to measure the sharpness of the peak. For a second-order circuit, Q is usually taken as:
That is, less dampness leads to more sharpness