Motivation
- Feature pyramids are a basic component in recognition systems for detecting objects at different scales.
- Deep learning object detectors avoid pyramid representation, in part because they are compute and memory intensive.
- We develop a top-down architecture with lateral connections for building high-level semantic feature maps at all scales, called Feature Pyramid Network (FPN)
Pyramid Usage in Detection
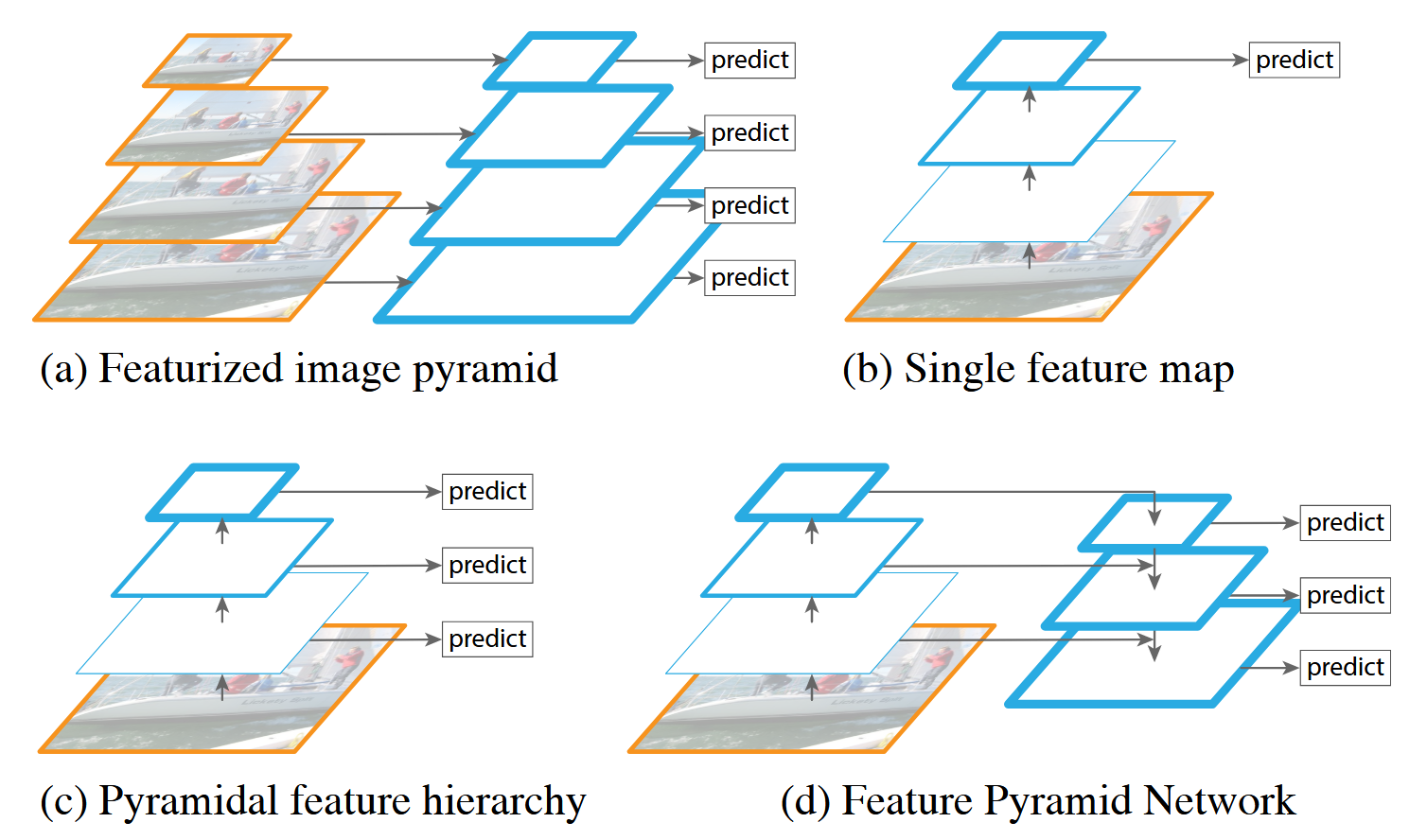
- (a) Using an image pyramid to build a feature pyramid: Features are computed on each of the image scales independently, which is slow.
- (b) Use only single scale features for fast detection: such as Fast R-CNN, Faster R-CNN, SPP-Net
- (c) Reuse the pyramidal feature hierarchy computed by a ConvNet as if it were a featurized image pyramid: like SSD
- (d) Feature Pyramid Network: fast and accurate
Architecture
Bottom-up pathway
The bottom-up pathway is the feed-forward computation of the backbone ConvNet, which computes a feature hierarchy consisting of feature maps at several scales with a scaling step of .
There are often many layers producing output maps of the same size and we say these layers are in the same network stage. For our feature pyramid, we choose the output of the last layer of each stage as our reference set of feature maps.
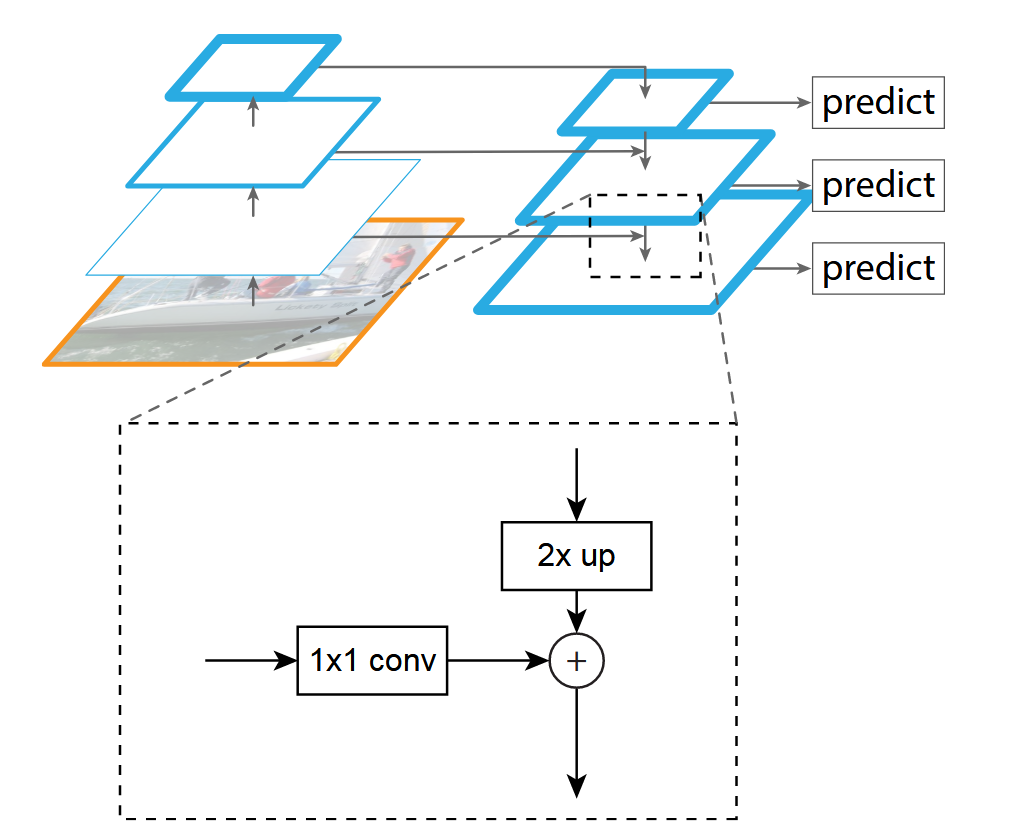
Top-down pathway and lateral connections
The top-down pathway hallucinates higher resolution features by upsampling spatially coarser, but semantically stronger, feature maps from higher pyramid levels.
These features are then enhanced with features from the bottom-up pathway via lateral connections. Each lateral connection merges feature maps of the same spatial size from the bottom-up feature map and the top-down pathway.